World models envision potential future states based on various ego actions. They embed extensive knowledge about the driving environment, facilitating safe and scalable autonomous driving.
Most existing methods primarily focus on either data generation or the pretraining paradigms of world models.
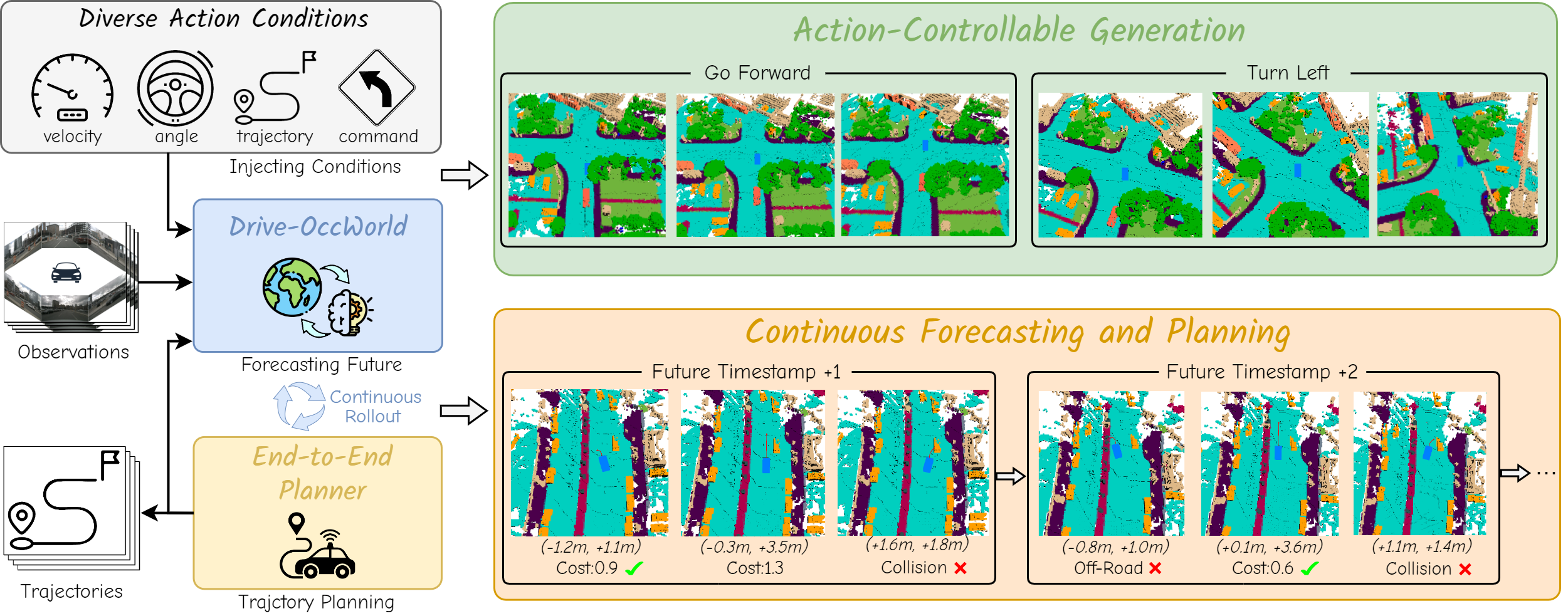
Unlike the aforementioned prior works, we propose Drive-OccWorld, which adapts a vision-centric 4D forecasting world model to end-to-end planning for autonomous driving.
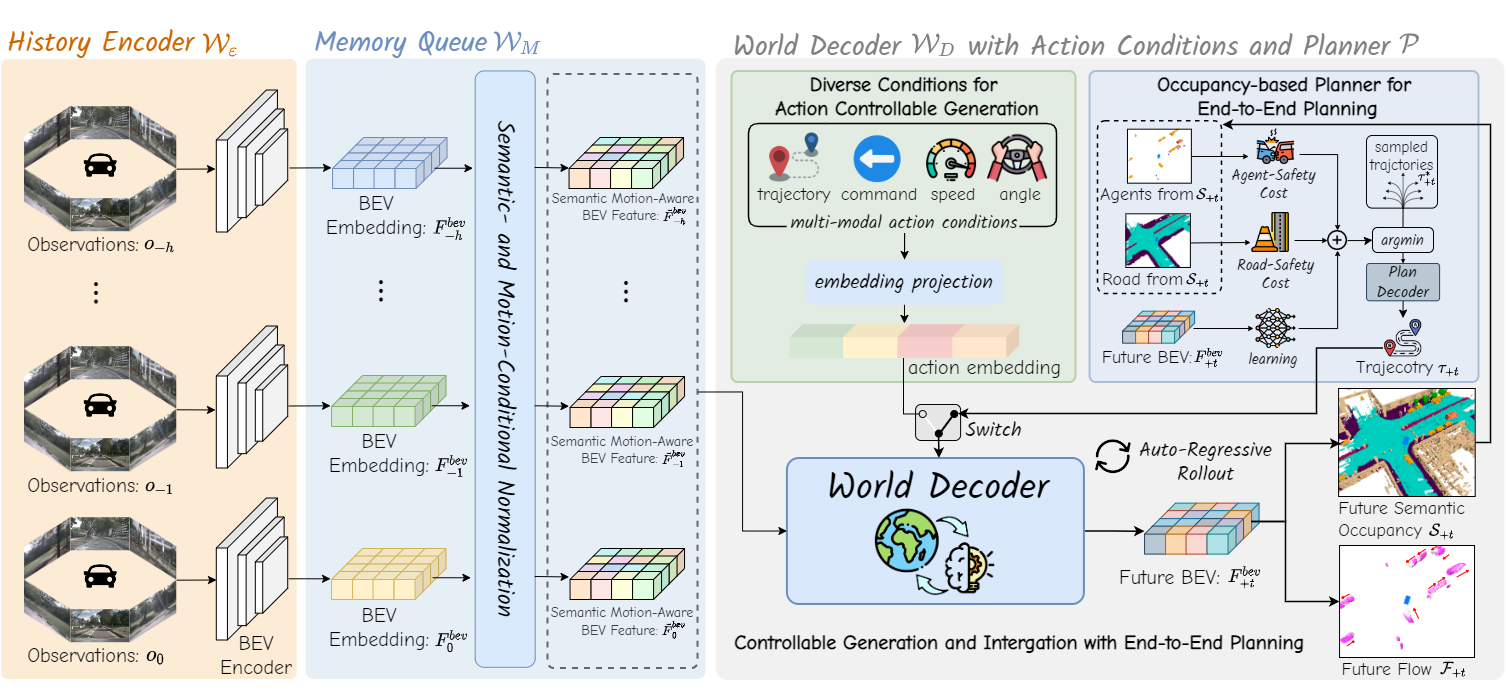
Specifically, we first introduce a semantic and motion-conditional normalization in the memory module, which accumulates semantic and dynamic information from historical BEV embeddings.
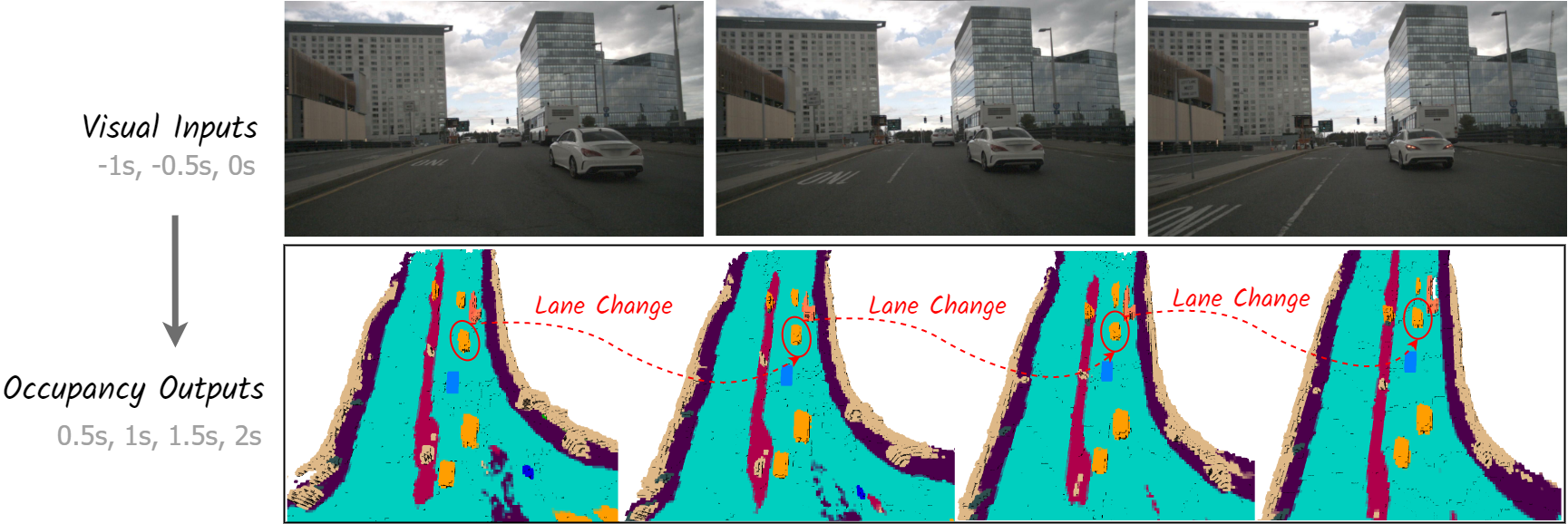
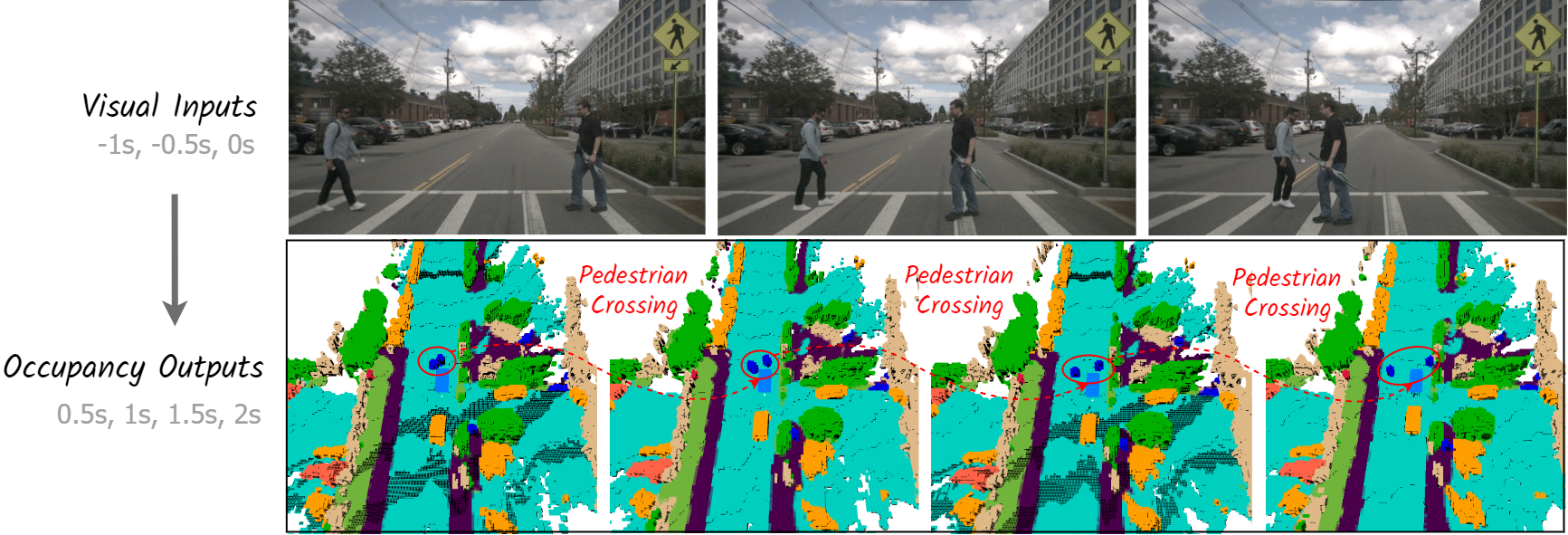
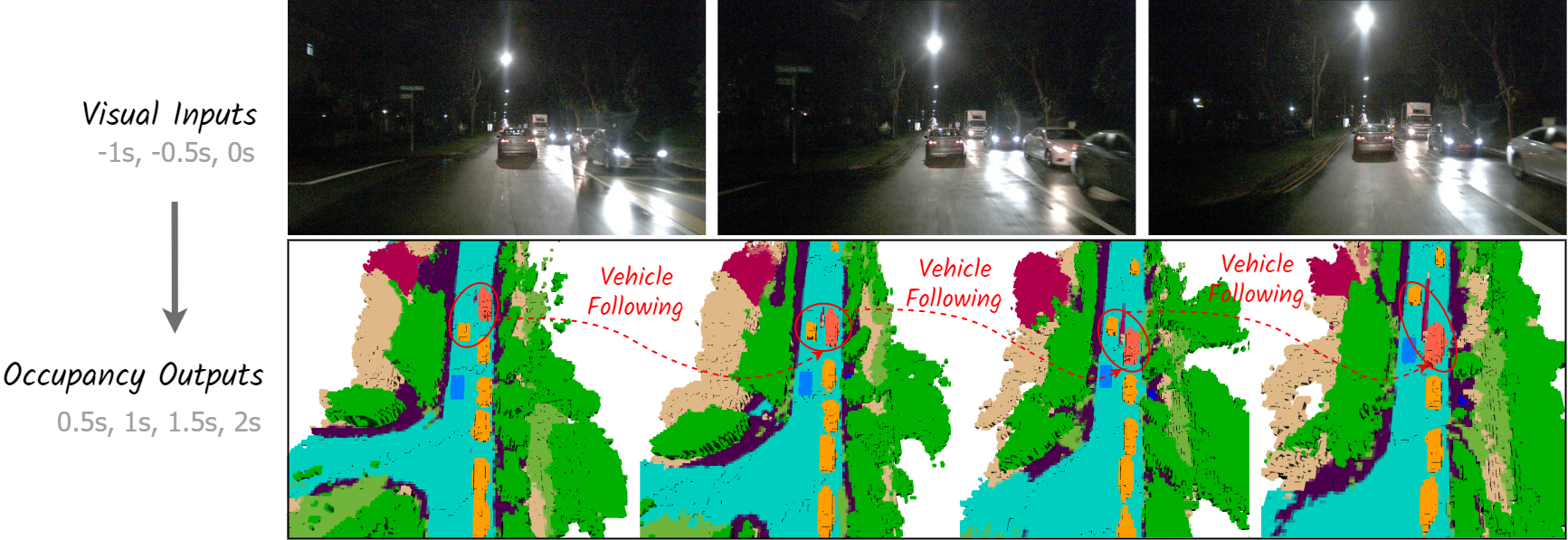
These BEV features are then conveyed to the world decoder for future occupancy and flow forecasting, considering both geometry and spatiotemporal modeling.
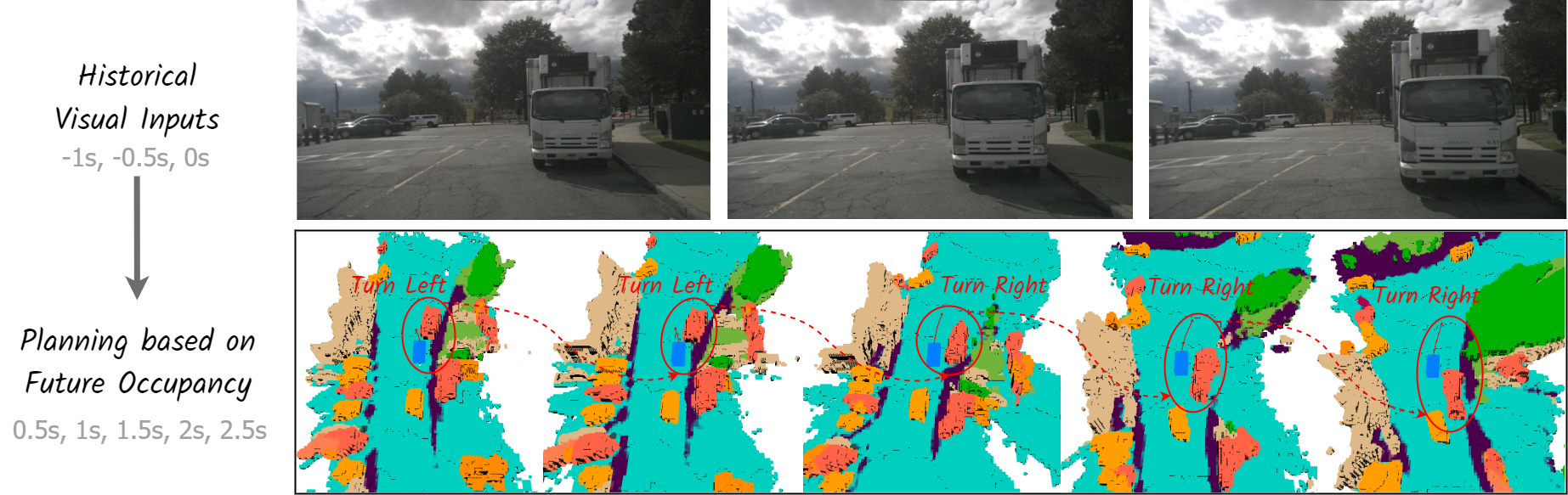
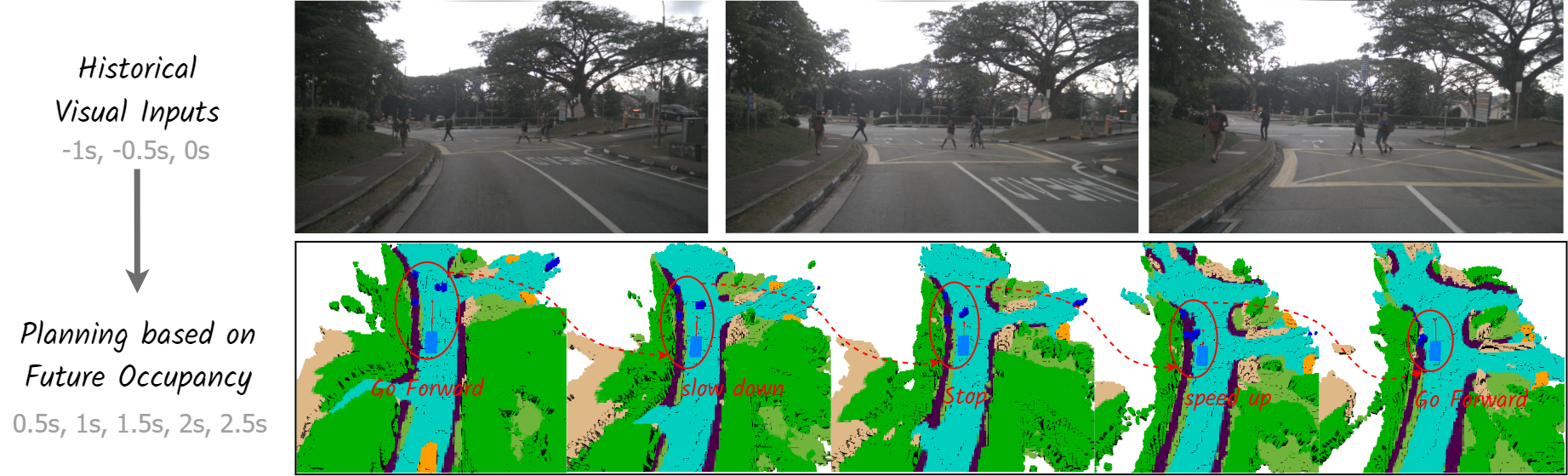
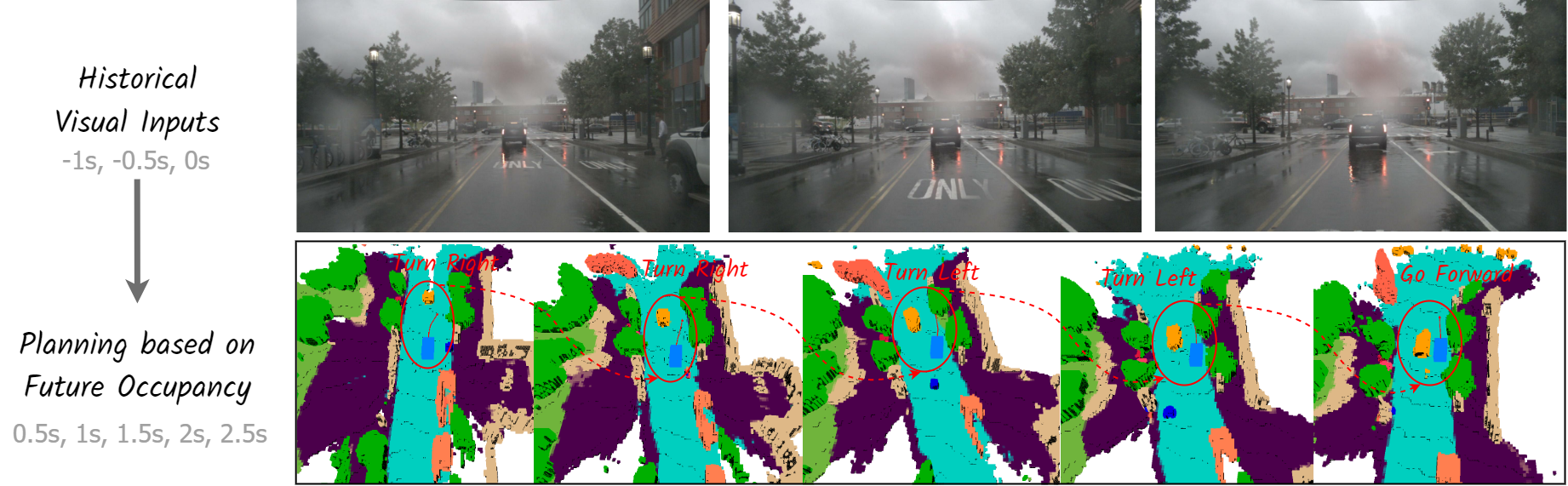
Additionally, we propose injecting flexible action conditions, such as velocity, steering angle, trajectory, and commands, into the world model to enable controllable generation and facilitate a broader range of downstream applications.
Furthermore, we explore integrating the generative capabilities of the 4D world model with end-to-end planning, enabling continuous forecasting of future states and the selection of optimal trajectories using an occupancy-based cost function.
Extensive experiments on the nuScenes dataset demonstrate that our method can generate plausible and controllable 4D occupancy, opening new avenues for driving world generation and end-to-end planning.